NMEA - nmea0183协议解析
美国国家海洋电子协会 (NMEA) 是一个非营利性协会,由制造商、分销商、经销商、教育机构和其他对外围海洋电子职业感兴趣的人组成。NMEA 0183 标准定义了用于船舶仪表之间通信的电气接口和数据协议。
NMEA 0183 是一项自愿性行业标准,于 1983 年 3 月首次发布。它不时更新;最新版本,目前(2001 年 8 月)3.0 版,2001 年 7 月,可从 NMEA 办公室获得(PS:非会员的价格为 250 美元)。
NMEA 还成立了一个工作组,为船上电子设备之间的数据通信制定新标准。新标准 NMEA 2000 是一种双向、多发射器、多接收器串行数据网络。它是多主站和自配置的,没有中央控制器。NMEA 于 2000 年 1 月开始与 11 家制造商进行 beta 测试。NMEA 2000 的发布版本预计将于 2001 年发布。
本文仅作为学习与交流使用,如有侵权内容,请联系[email protected]删除!
信息格式
所有数据都以句子的形式传输。只允许打印 ASCII 字符,加上 CR (回车) 和 LF (换行)。每个句子都以“$”符号开头,以 <CR><LF> 结尾。有三种基本类型的句子:谈话者句子、专有句子和查询句。
表1-1 标准语句格式
一个句子最多可以包含 80 个字符加上 “$” 和 CR/LF。如果字段的数据不可用,则省略该字段,但仍会发送分隔逗号
(逗号之间没有空格)。校验和字段由一个 “*” 和两个十六进制数字组成,这些十六进制数字表示 “$” 和 “*” 之间(但不包括)的所有字符的xor。
表1-2 保留字符表
校验和计算
fun calculateNmeaChecksum(nmeaSentence: String): String {
val sentence = nmeaSentence.trimStart('$').substringBefore('*')
var checksum = 0
for (char in sentence) {
checksum = checksum xor char.code
}
return String.format("%02X", checksum)
}其它TALKER标识符
AG Autopilot - General (自动驾驶)
AP Autopilot - Magnetic
CD Communications – Digital Selective Calling (DSC)
CR Communications – Receiver / Beacon Receiver
CS Communications – Satellite
CT Communications – Radio-Telephone (MF/HF)
CV Communications – Radio-Telephone (VHF)
CX Communications – Scanning Receiver
DF Direction Finder
EC Electronic Chart Display & Information System (ECDIS)
EP Emergency Position Indicating Beacon (EPIRB)
ER Engine Room Monitoring Systems
GP Global Positioning System (GPS) (全球定位系统)
HC Heading – Magnetic Compass
HE Heading – North Seeking Gyro
HN Heading – Non North Seeking Gyro
II Integrated Instrumentation
IN Integrated Navigation
LC Loran C
P Proprietary Code
RA RADAR and/or ARPA
SD Sounder, Depth
SN Electronic Positioning System, other/general
SS Sounder, Scanning
TI Turn Rate Indicator
VD Velocity Sensor, Doppler, other/general
DM Velocity Sensor, Speed Log, Water, Magnetic
VW Velocity Sensor, Speed Log, Water, Mechanical
WI Weather Instruments
YX Transducer
ZA Timekeeper – Atomic Clock
ZC Timekeeper – Chronometer
ZQ Timekeeper – Quartz
ZV Timekeeper – Radio Update, WWV or WWVH
输出语句
接下来是一些通用指令的解析~!
AAM Waypoint Arrival Alarm
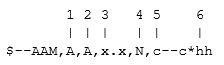
Status, BOOLEAN, A = Arrival circle entered
Status, BOOLEAN, A = perpendicular passed at waypoint
Arrival circle radius
Units of radius, nautical miles
Waypoint ID
CheckSum
ALM GPS Almanac Data

1) Total number of messages
2) Message Number
3) Satellite PRN number (01 to 32)
4) GPS Week Number: Date and time in GPS is computed as number of weeks from 6 January 1980 plus number of seconds into the week.
5) SV health, bits 17-24 of each almanac page
6) Eccentricity
7) Almanac Reference Time
8) Inclination Angle
9) Rate of Right Ascension
10) Root of semi-major axis
11) Argument of perigee
12) Longitude of ascension node
13) Mean anomaly
14) F0 Clock Parameter
15) F1 Clock Parameter
16) Checksum
APA Autopilot Sentence "A"
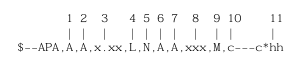
1) Status V = LORAN-C Blink or SNR warning A = general warning flag or other navigation systems when a reliable fix is not available
2) Status V = Loran-C Cycle Lock warning flag A = OK or not used
3) Cross Track Error Magnitude
4) Direction to steer, L or R
5) Cross Track Units (Nautic miles or kilometres)
6) Status A = Arrival Circle Entered
7) Status A = Perpendicular passed at waypoint
8) Bearing origin to destination
9) M = Magnetic, T = True
10) Destination Waypoint ID
11) checksum
APB Autopilot Sentence "B"

1) Status
V = LORAN-C Blink or SNR warning
A = general warning flag or other navigation systems when a reliable fix is not available
2) Status
V = Loran-C Cycle Lock warning flag
A = OK or not used
3) Cross Track Error Magnitude
4) Direction to steer, L or R
5) Cross Track Units, N = Nautical Miles
6) Status
A = Arrival Circle Entered
7) Status
A = Perpendicular passed at waypoint
8) Bearing origin to destination
9) M = Magnetic, T = True
10) Destination Waypoint ID
11) Bearing, present position to Destination
12) M = Magnetic, T = True
13) Heading to steer to destination waypoint
14) M = Magnetic, T = True
15) Checksum
ASD Autopilot System Data
未知格式
[补充] ATR 定位/定向导航消息
$--ATR,hhmmss.ss,a,x.x,x.x,x.x,x.x,a,x.x,x.x, *hh示例: $GPATR,062743.00,4,0.000,-0.002,0.000,0.006,4,37.19,-76.84,*7F
BEC Bearing & Distance to Waypoint – Dead Reckoning

01) Time (UTC)
02) Waypoint Latitude
03) N = North, S = South
04) Waypoint Longitude
05) E = East, W = West
06) Bearing, True
07) T = True
08) Bearing, Magnetic
09) M = Magnetic
10) Nautical Miles
11) N = Nautical Miles
12) Waypoint ID
13) Checksum
[补充] BESTPOSA 输出最佳位置信息
格式:#BESTPOSA,,,,,,,,,; a, a,xxx.xx,xxx.xx,xxx.xx,xxx.xx,a,xx.xx,xx.xx,xx.xx, a,xx.xx,xx.xx, xx, xx, xx,xx, , a, xx, xx*hhhhhhhh
待定
BOD Bearing – Waypoint to Waypoint
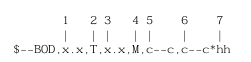
1) Bearing Degrees, TRUE
2) T = True
3) Bearing Degrees, Magnetic
4) M = Magnetic
5) TO Waypoint
6) FROM Waypoint
7) Checksum
BWC Bearing and Distance to Waypoint – Latitude, N/S, Longitude, E/W, UTC, Status

1) Time (UTC)
2) Waypoint Latitude
3) N = North, S = South
4) Waypoint Longitude
5) E = East, W = West
6) Bearing, True
7) T = True
8) Bearing, Magnetic
9) M = Magnetic
10) Nautical Miles
11) N = Nautical Miles
12) Waypoint ID
13) Checksum
BWR Bearing and Distance to Waypoint – Rhumb Line Latitude, N/S, Longitude, E/W, UTC, Statu

1) Time (UTC)
2) Waypoint Latitude
3) N = North, S = South
4) Waypoint Longitude
5) E = East, W = West
6) Bearing, True
7) T = True
8) Bearing, Magnetic
9) M = Magnetic
10) Nautical Miles
11) N = Nautical Miles
12) Waypoint ID
13) Checksum
BWW Bearing – Waypoint to Waypoint

1) Bearing Degrees, TRUE
2) T = True
3) Bearing Degrees, Magnetic
4) M = Magnetic
5) TO Waypoint
6) FROM Waypoint
7) Checksum
DBK Depth Below Keel
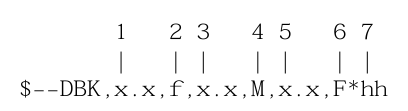
1) Depth, feet
2) f = feet
3) Depth, meters
4) M = meters
5) Depth, Fathoms
6) F = Fathoms
7) Checksum
DBS Depth Below Surface

1) Depth, feet
2) f = feet
3) Depth, meters
4) M = meters
5) Depth, Fathoms
6) F = Fathoms
7) Checksum
DBT Depth Below Transducer
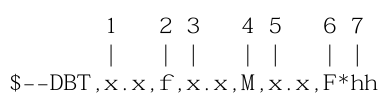
1) Depth, feet
2) f = feet
3) Depth, meters
4) M = meters
5) Depth, Fathoms
6) F = Fathoms
7) Checksum
DCN Decca Position
obsolete
DPT Heading – Deviation & Variation
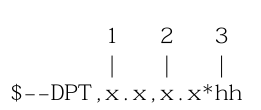
1) Depth, meters
2) Offset from transducer;
positive means distance from transducer to water line,
negative means distance from transducer to keel
3) Checksum
DSC Digital Selective Calling Information
未知格式
DSE Extended DSC
未知格式
DSI DSC Transponder Initiate
未知格式
DSR DSC Transponder Response
未知格式
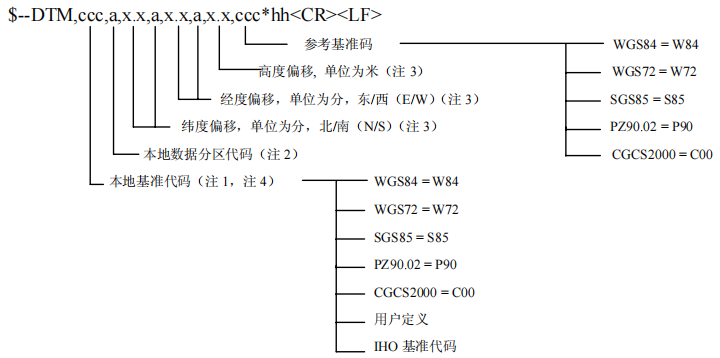
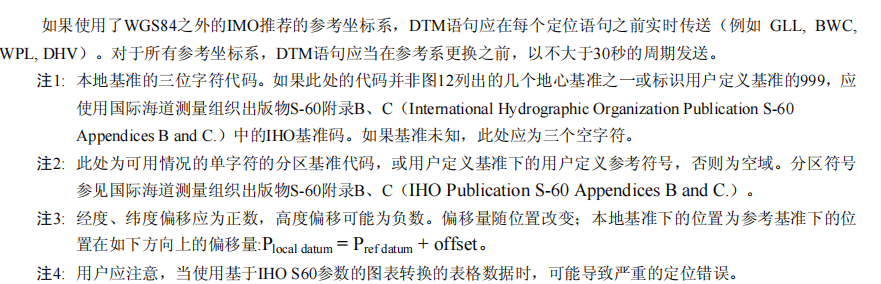
DTM Datum Reference
作用:定义后续语句所使用的测量基准,同时也定义了参考基准,并提供本地大地测量基准相对于参考基准的经纬度、高度的偏移。
FSI Frequency Set Information
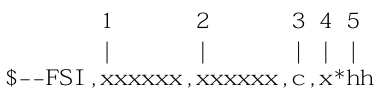
1) Transmitting Frequency
2) Receiving Frequency
3) Communications Mode (NMEA Syntax 2)
4) Power Level
5) Checksum
GBS GPS Satellite Fault Detection
未知格式
GGA Global Positioning System Fix Data. Time, Position and fix related data for a GPS receiver
功能描述:输出定位结果。

1) Time (UTC)
2) Latitude 注释①
3) N or S (North or South)
4) Longitude 注释②
5) E or W (East or West)
6) GPS Quality Indicator, 注释③
0 - fix not available,
1 - GPS fix,
2 - Differential GPS fix
7) Number of satellites in view, 00 - 12
8) Horizontal Dilution of precision
9) Antenna Altitude above/below mean-sea-level (geoid)
10) Units of antenna altitude, meters
11) Geoidal separation, the difference between the WGS-84 earth ellipsoid and mean-sea-level (geoid), "-" means mean-sea-level below ellipsoid
12) Units of geoidal separation, meters
13) Age of differential GPS data, time in seconds since last SC104 type 1 or 9 update, null field when DGPS is not used 注释④
14) Differential reference station ID, 0000-1023 注释⑤
15) Checksum
注释①:28°13.9908005′,取值范围为0°~90°小数点前保留2位为分,其余为度。
注释②:112°52.6285300′,取值范围为0°~180°小数点前保留2位为分,其余为度。
注释③:0:无效解;1:单点定位解;2:伪距差分;4:固定解;5:浮动解。
注释③:0:无效解;1:单点定位解;2:伪距差分;4:固定解;5:浮动解。
注释④:差分龄期:距离上次接收到差分信号的时间。
注释⑤:单点定位时ID为0,RTK时为所接收的差分数据来源基准站ID。
GLC Geographic Position, Loran-C

1) GRI Microseconds/10
2) Master TOA Microseconds
3) Master TOA Signal Status
4) Time Difference 1 Microseconds
5) Time Difference 1 Signal Status
6) Time Difference 2 Microseconds
7) Time Difference 2 Signal Status
8) Time Difference 3 Microseconds
9) Time Difference 3 Signal Status
10) Time Difference 4 Microseconds
11) Time Difference 4 Signal Status
12) Time Difference 5 Microseconds
13) Time Difference 5 Signal Status
14) Checksum
GLL Geographic Position – Latitude/Longitude

1) Latitude
2) N or S (North or South)
3) Longitude
4) E or W (East or West)
5) Time (UTC)
6) Status A - Data Valid, V - Data Invalid
7) Checksum
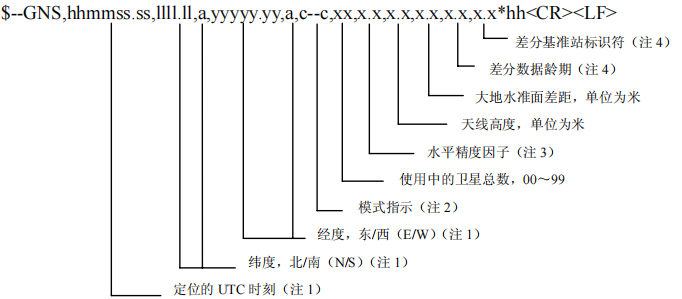
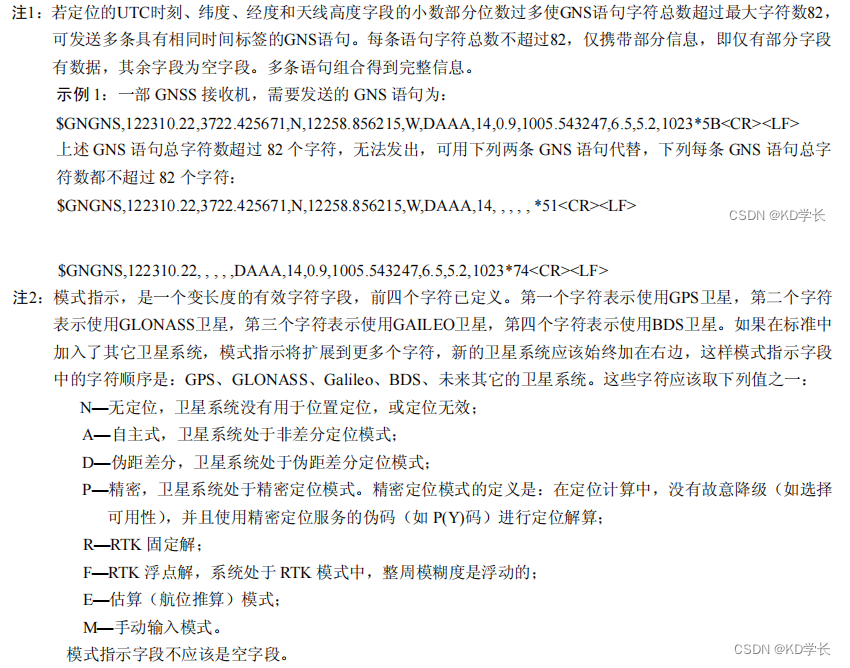
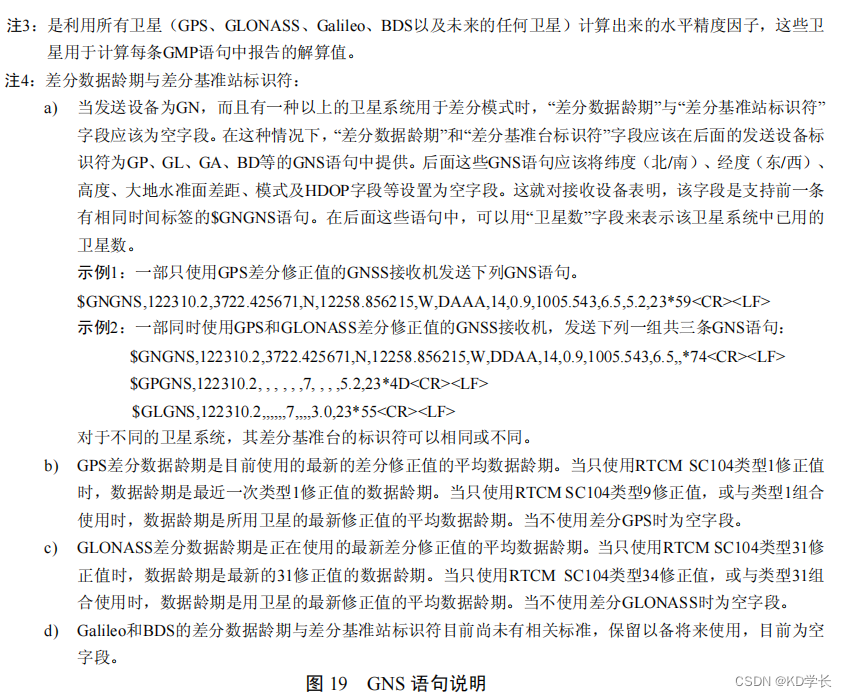
[补充] GNS
描述:GNSS定位数据,用于单一或组合式卫星导航系统(GNSS)的定位数据。
GRS GPS Range Residuals
未知格式
GST GPS Pseudorange Noise Statistics
未知格式
GSA GPS DOP and active satellites

1) Selection mode (定位模式)
M = 手动选择
A = 自动选择
2) Mode (定位状态)
1 = 没有定位
2 = 2D定位
3 = 3D定位
3) ID of 1st satellite used for fix (卫星编号,一般来说是空空如也)
4) ID of 2nd satellite used for fix ...
14) ID of 12th satellite used for fix
15) PDOP in meters 空间位置精度因子
16) HDOP in meters 水平位置精度因子
17) VDOP in meters 高程精度因子
18) Checksum 校验和
卫星编号
在一个系统(GPS或BD)里,一颗卫星对应唯一的prn,也对应唯一一组伪随机码。
GPS : 2020-7 , PRN为1-32 ,在轨卫星包括BLOCK IIA(淘汰)、IIR( 11颗)、IIR-
M ( 7颗, 5/7/12/15/17/29/31). IIF (12颗)、II(1颗,4)
GPS SBAS: 标识为33-64 ( PRN为120-158 ,标识=PRN-87 )
GLONASS: 可以使用65-96 ,在轨24颗(编号65-88)。Uragan-M (23颗) , Uragan-K1 ( 1颗)
日本QZSS卫星: 193-199
北斗: 卫星号201-261 ( PRN+ 200 )
伽利略: 卫星号301-336 ( PRN+300 )
IRNSS : 卫星号901-918 ( PRN+900 )
中国北斗系统卫星星座状态
空间定位精度
位置几何精度因子(PDOP)是表征卫星与用户相对位置关系几何强度的参数,用户的定位精度可以简单表示为PDOP*UERE,在用户测距误差一定的情况下,PDOP越大定位精度越差,PDOP越小定位精度越高。

DOP反映了可见卫星与接收机空间几何结构对用户测距误差的放大作用。在利用伪距观测量进行动态绝对定位时,其权系数阵可表示为:
PDOP定义为:

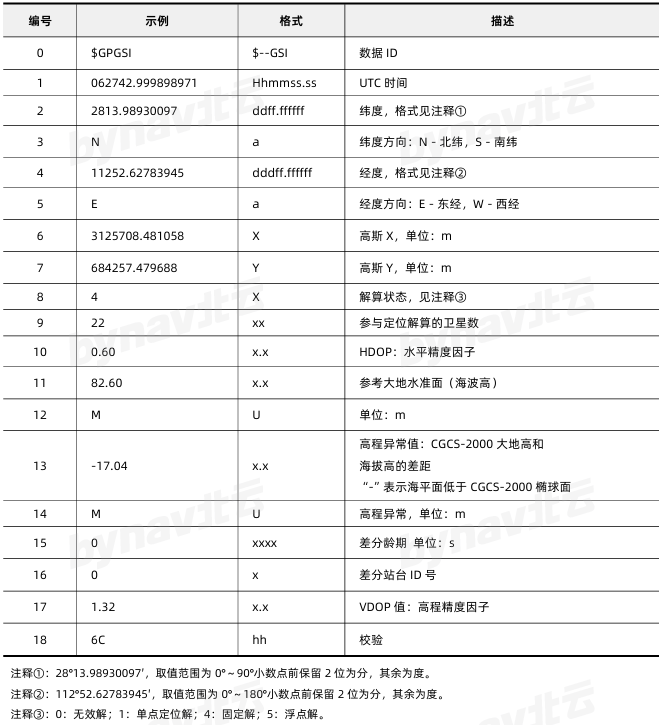
[补充] GSI
功能描述:GSI语句作为车载型定位定向仪的定位信息语句,给出了时间、日期、经度、纬度、高 斯坐标、高程、所用到的卫星颗数、精度因子等定位信息数据。
格式: $--GSI,hhmmss.ss,ddff.ffffff,a,dddff.ffffff,a,X,Y,x,xx,x.x,x.x,U,x.x,U,xxxx,x,x.x*hh
示例: $GPGSI,062742.999898971,2813.98930097,N,11252.62783945,E,3125708.481058,684257.479688,4,22,0.60,82.60,M,-17.04,M,0,0,1.32*6C
[补充] GST
功能描述:GPS 伪距噪声统计,包括了三维坐标的标准偏差信息。
格式: $GPGST,HHMMSS.SS,A.A,B.B,C.C,D.D,E.E,F.F,G.G *CC
示例: $GPGST,024603.00,3.2,6.6,4.7,47.3,5.8,5.6,22.0*58

GSV Satellites in view
用途:输出可视的卫星状态,包括:可视的卫星数、卫星标识号、仰角、方位角及信噪比(SNR) 值。
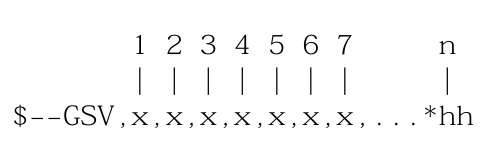
1) total number of messages GSV数据总数
2) message number 当前GSV语句序号
3) satellites in view 视野内卫星数量
4) satellite number 卫星号
5) elevation in degrees 卫星仰角(单位:度)
6) azimuth in degrees to true 卫星方位角(单位:度)
7) SNR in dB more satellite infos like 4)-7)
n-1) 信息标识符 不可为空
n) Checksum
每条语句最多传输4颗卫星的信息,如果剩余需要输出信息的卫星不足4颗,按实际数目输出,其余字段以“,,,”填 充。(每条语句中逗号的数目必须相同)。
GTD Geographic Location in Time Differences
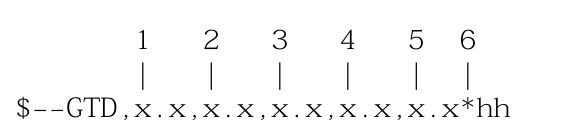
1) time difference
2) time difference
3) time difference
4) time difference
5) time difference
n) Checksum
GXA TRANSIT Position – Latitude/Longitude, Location and Time of TRANSIT Fix at Waypoint
废弃
HDG Heading – Deviation & Variation
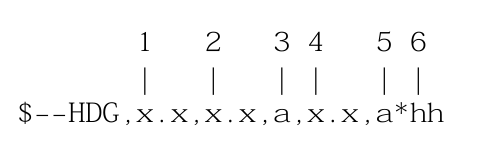
1) Magnetic Sensor heading in degrees
2) Magnetic Deviation, degrees
3) Magnetic Deviation direction, E = Easterly, W = Westerly
4) Magnetic Variation degrees
5) Magnetic Variation direction, E = Easterly, W = Westerly
6) Checksum
HDM Heading – Magnetic
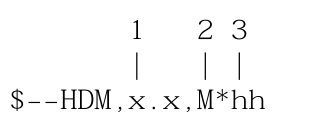
1) Heading Degrees, magnetic
2) M = magnetic
3) Checksum
HDT Heading – True
功能描述:输出方位角,以真北为参考。
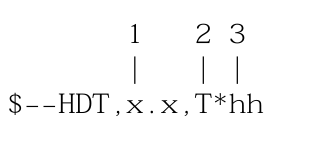
1) Heading Degrees, true 方位角(单位:度)
2) T = True 真北标识符
3) Checksum
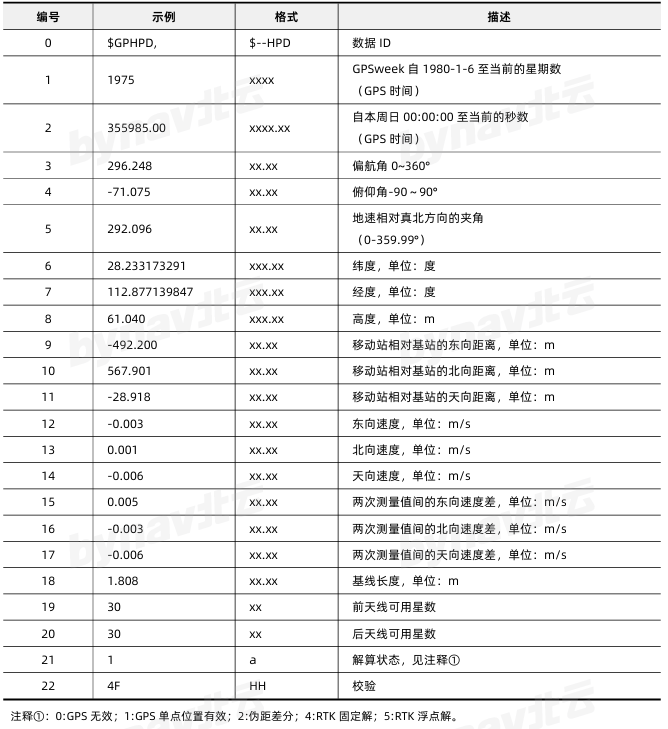
[补充] HPD
功能描述:GPS定位定向消息集。
格式: $GPHPD,xxxx,xxxx.xx,xx.xx,xx.xx,xx.xx,xxx.xx,xxx.xx,xxx.xx,xx.xx,xx.xx,xx.xx,xx.xx,xx.xx,xx.x 13/24 x,xx.xx,xx.xx,xx.xx,xx.xx,xx,xx,a*hh
示例:$GPHPD,1975,355985.00,296.248, 71.075,292.096,28.233173291,112.877139847,61.040, 492.200,567.901, 28.918, 0.003,0.001, 0.006, 0.005, 0.003, 0.006,1.808,30,30,1*4F
HSC Heading Steering Command
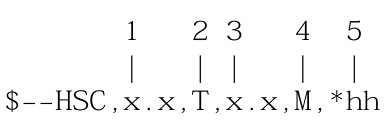
1) Heading Degrees, True
2) T = True
3) Heading Degrees, Magnetic
4) M = Magnetic
5) Checksum
LCD Loran-C Signal Data

1) GRI Microseconds/10
2) Master Relative SNR
3) Master Relative ECD
4) Time Difference 1 Microseconds
5) Time Difference 1 Signal Status
6) Time Difference 2 Microseconds
7) Time Difference 2 Signal Status
8) Time Difference 3 Microseconds
9) Time Difference 3 Signal Status
10) Time Difference 4 Microseconds
11) Time Difference 4 Signal Status
12) Time Difference 5 Microseconds
13) Time Difference 5 Signal Status
14) Checksum
MSK MSK Receiver Interface (for DGPS Beacon Receivers)
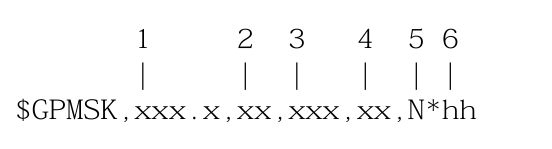
1) Frequency in kHz (283.5 to 325.0)
2) Frequency Selection M1 = Manual A1 = Automatic (field 1 empty)
3) MSK bit rate (100 or 200)
4) Bit Rate Selection M2 = Manual A2 = Automatic (field 3 empty)
5) Period of output of performance status message, 0 to 100 seconds ($CRMSS)
6) Checksum
MSS MSK Receiver Signal Status
未知格式
MWD Wind Direction & Speed
未知格式
MTW Water Temperature
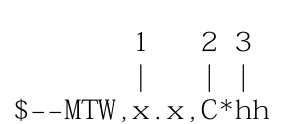
1) Degrees
2) Unit of Measurement, Celcius
3) Checksum
MWV Wind Speed and Angle
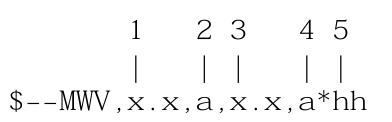
1) Wind Angle, 0 to 360 degrees
2) Reference, R = Relative, T = True
3) Wind Speed
4) Wind Speed Units, K/M/N
5) Status, A = Data Valid
6) Checksum
OLN Omega Lane Numbers
未知格式
OSD Own Ship Data

1) Heading, degrees true
2) Status, A = Data Valid
3) Vessel Course, degrees True
4) Course Reference
5) Vessel Speed
6) Speed Reference
7) Vessel Set, degrees True
8) Vessel drift (speed)
9) Speed Units
10) Checksum
ROO Waypoints in Active Route
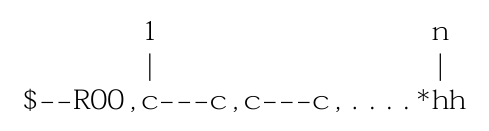
1) waypoint ID
...
n) checksum
RMA Recommended Minimum Navigation Information

1) Blink Warning
2) Latitude
3) N or S
4) Longitude
5) E or W
6) Time Difference A, µS
7) Time Difference B, µS
8) Speed Over Ground, Knots
9) Track Made Good, degrees true
10) Magnetic Variation, degrees
11) E or W
12) Checksum
RMB Recommended Minimum Navigation Information

1) Status, V = Navigation receiver warning
2) Cross Track error - nautical miles
3) Direction to Steer, Left or Right
4) TO Waypoint ID
5) FROM Waypoint ID
6) Destination Waypoint Latitude
7) N or S
8) Destination Waypoint Longitude
9) E or W
10) Range to destination in nautical miles
11) Bearing to destination in degrees True
12) Destination closing velocity in knots
13) Arrival Status, A = Arrival Circle Entered
14) Checksum
RMC Recommended Minimum Navigation Information
描述:推荐的最少专用 GNSS 数据

1) Time (UTC) 定位的UTC时间
2) Status, 状态(不可为空)
V = Navigation receiver warning
3) Latitude 纬度
4) N or S 表示纬度在北还是在南
5) Longitude 经度
6) E or W 在东还是在西
7) Speed over ground, knots 对地速度(单位:节)
8) Track made good, degrees true 对地真航向(单位:度)
9) Date, ddmmyy 日期
10) Magnetic Variation, degrees 磁偏向(单位:度)
11) E or W
12) 模式指示(N=数据无效, A=自主定位, F=估算, R=差分)
13) 导航状态(根据上海IEC 61108 该字段不可为空)
S = Safe
C = Caution
U = Unsafe
V = 导航状态无效
12) Checksum
ROT Rate Of Turn
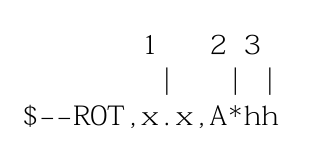
1) Rate Of Turn, degrees per minute, "-" means bow turns to port
2) Status, A means data is valid
3) Checksum
RPM Revolutions
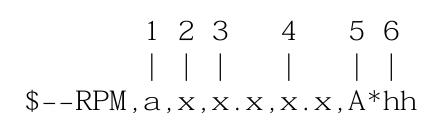
1) Source; S = Shaft, E = Engine
2) Engine or shaft number
3) Speed, Revolutions per minute
4) Propeller pitch, % of maximum, "-" means astern
5) Status, A means data is valid
6) Checksum
RSA Rudder Sensor Angle
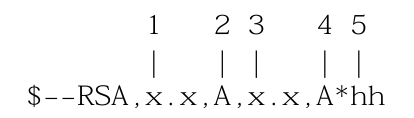
1) Starboard (or single) rudder sensor, "-" means Turn To Port
2) Status, A means data is valid
3) Port rudder sensor
4) Status, A means data is valid
5) Checksum
RSD RADAR System Data

9) Cursor Range From Own Ship
10) Cursor Bearing Degrees Clockwise From Zero
11) Range Scale
12) Range Units
14) Checksum
RTE Routes

1) Total number of messages being transmitted
2) Message Number
3) Message mode
c = complete route, all waypoints
w = working route, the waypoint you just left, the waypoint you're heading to, then all the rest
4) Waypoint ID
x) More Waypoints
n) Checksum
SFI Scanning Frequency Information

1) Total Number Of Messages
2) Message Number
3) Frequency 1
4) Mode 1
n) Checksum
STN Multiple Data ID
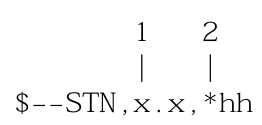
1) Talker ID Number
2) Checksum
TLL Target Latitude and Longitude
未知格式
TRF TRANSIT Fix Data
未知格式
TTM Tracked Target Message
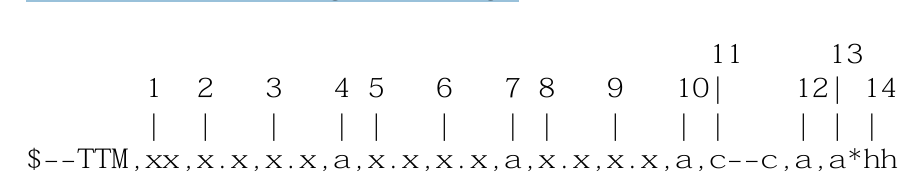
1) Target Number
2) Target Distance
3) Bearing from own ship
4) Bearing Units
5) Target speed
6) Target Course
7) Course Units
8) Distance of closest-point-of-approach
9) Time until closest-point-of-approach "-" means increasing
10) "-" means increasing
11) Target name
12) Target Status
13) Reference Target
14) Checksum
VBW Dual Ground/Water Speed
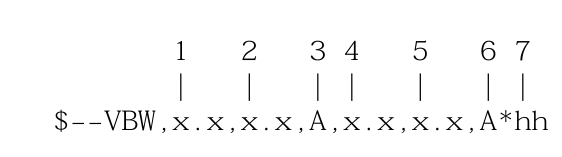
1) Longitudinal water speed, "-" means astern
2) Transverse water speed, "-" means port
3) Status, A = data valid
4) Longitudinal ground speed, "-" means astern
5) Transverse ground speed, "-" means port
6) Status, A = data valid
7) Checksum
VDR Set and Drift
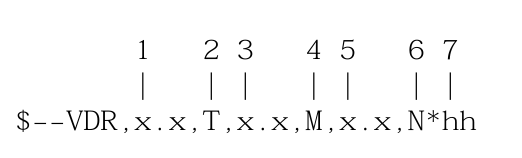
1) Degress True
2) T = True
3) Degrees Magnetic
4) M = Magnetic
5) Knots (speed of current)
6) N = Knots
7) Checksum
VHW Water Speed and Heading
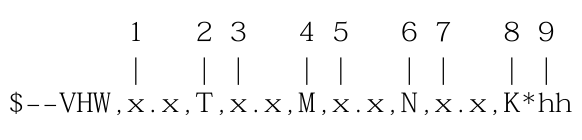
1) Degress True
2) T = True
3) Degrees Magnetic
4) M = Magnetic
5) Knots (speed of vessel relative to the water)
6) N = Knots
7) Kilometers (speed of vessel relative to the water)
8) K = Kilometres
9) Checksum
VLW Distance Traveled through Water
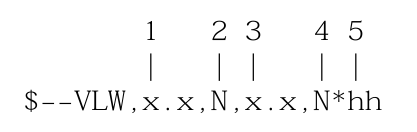
1) Total cumulative distance
2) N = Nautical Miles
3) Distance since Reset
4) N = Nautical Miles
5) Checksum
VPW Speed – Measured Parallel to Wind
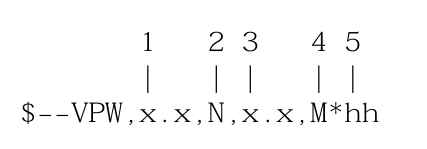
1) Speed, "-" means downwind
2) N = Knots
3) Speed, "-" means downwind
4) M = Meters per second
5) Checksum
VTG Track Made Good and Ground Speed
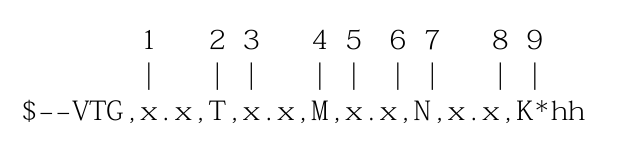
1) Track Degrees 对地航向(单位:度)
2) T = True 真北标识符
3) Track Degrees 对地航线(单位:度)
4) M = Magnetic 磁北标识符
5) Speed Knots 对象速度
6) N = Knots 单位节
7) Speed Kilometers Per Hour 对地速度
8) K = Kilometres Per Hour 对地速度单位(km/h)
9) Checksum
VWR Relative Wind Speed and Angle
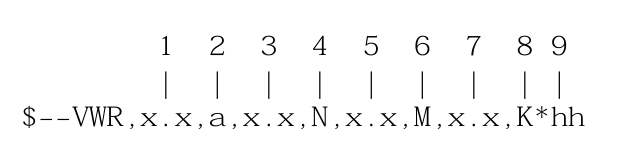
1) Wind direction magnitude in degrees
2) Wind direction Left/Right of bow
3) Speed
4) N = Knots
5) Speed
6) M = Meters Per Second
7) Speed
8) K = Kilometers Per Hour
9) Checksum
WCV Waypoint Closure Velocity
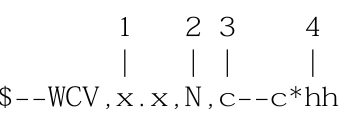
1) Velocity
2) N = knots
3) Waypoint ID
4) Checksum
WDC Distance to Waypoint – Great Circle
未知格式
WDR Distance to Waypoint – Rhumb Line
未知格式
WNC Distance – Waypoint to Waypoint
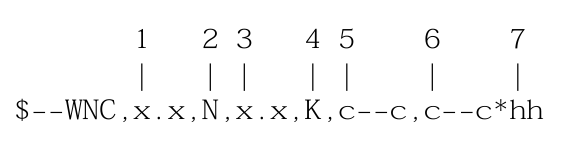
1) Distance, Nautical Miles
2) N = Nautical Miles
3) Distance, Kilometers
4) K = Kilometers
5) TO Waypoint
6) FROM Waypoint
7) Checksum
WPL Waypoint Location
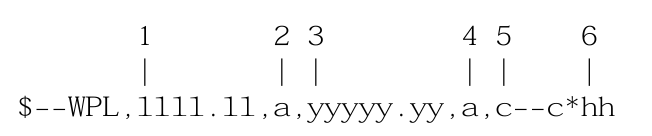
1) Latitude
2) N or S (North or South)
3) Longitude
4) E or W (East or West)
5) Waypoint Name
6) Checksum
XDR Cross Track Error – Dead Reckoning
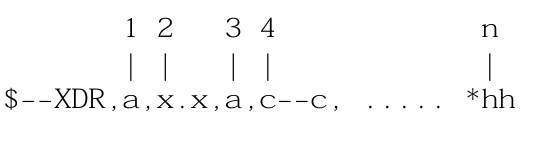
1) Transducer type
2) Measurement data
3) Units of measurement
4) Name of transducer
x) More of the same
n) Checksum
XTE Cross-Track Error – Measured
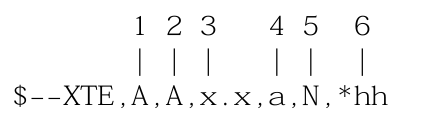
1) Status
V = LORAN-C blink or SNR warning
A = general warning flag or other navigation systems when a reliable fix is not available
2) Status
V = Loran-C cycle lock warning flag
A = OK or not used
3) Cross track error magnitude
4) Direction to steer, L or R
5) Cross track units. N = Nautical Miles
6) Checksum
XTR Cross Track Error – Dead Reckoning
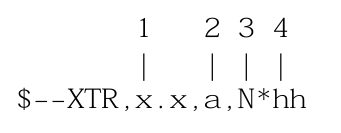
1) Magnitude of cross track error
2) Direction to steer, L or R
3) Units, N = Nautical Miles
4) Checksum
ZDA Time & Date – UTC, Day, Month, Year and Local Time Zone

1) Local zone minutes description, same sign as local hours
2) Local zone description, 00 to +/- 13 hours
3) Year
4) Month, 01 to 12
5) Day, 01 to 31
6) Time (UTC)
7) Checksum
ZDL Time and Distance to Variable Point
未知协议
ZFO UTC & Time from Origin Waypoint
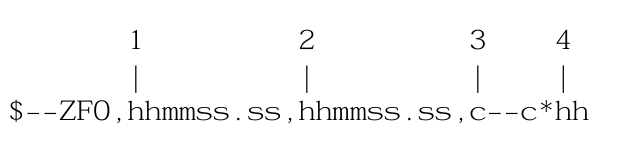
1) Time (UTC)
2) Elapsed Time
3) Origin Waypoint ID
4) Checksum
ZTG UTC & Time to Destination Waypoint

1) Time (UTC)
2) Time Remaining
3) Destination Waypoint ID
4) Checksum
专有语句
$PGRMC Sensor Configuration Information
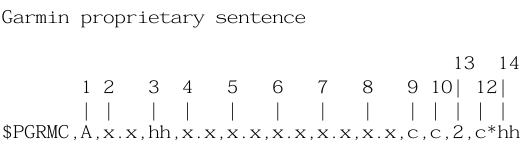
1) Fix mode, A=automatic (only option)
2) Altitude above/below mean sea level, -1500.0 to 18000.0 meters
3) Earth datum index. If the user datum index (96) is specified, fields 5-8 must contain valid values. Otherwise, fields 4-8 must be null.
4) User earth datum semi-major axis, 6360000.0 to 6380000.0 meters (.001 meters resolution)
5) User earth datum inverse flattening factor, 285.0 to 310.0 (10-9 resolution)
6) User earth datum delta x earth centered coordinate, -5000.0 to 5000.0 meters (1 meter resolution)
7) User earth datum delta y earth centered coordinate, -5000.0 to 5000.0 meters (1 meter resolution)
8) User earth datum delta z earth centered coordinate, -5000.0 to 5000.0 meters (1 meter resolution)
9) Differential mode, A = automatic (output DGPS data when available, non-DGPs otherwise), D = differential exclusively (output only differential fixes)
10) NMEA Baud rate, 1 = 1200, 2 = 2400, 3 = 4800, 4 = 9600
11) Filter mode, 2 = no filtering (only option)
12) PPS mode, 1 = No PPS, 2 = 1 Hz
13) Checksum
$PGRME Estimated Position Error
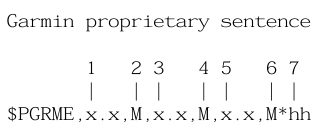
1) Estimated horizontal position error (HPE)
2) Unit, metres
3) Estimated vertical error (VPE)
4) Unit, metres
5) Overall spherical equivalent position error
6) Unit, metres
7) Checksum
$PGRMF Position Fix Sentence

1) GPS week number (0 - 1023)
2) GPS seconds (0 - 604799)
3) UTC date of position fix
4) UTC time of position fix
5) GPS leap second count
6) Latitude
7) N or S
8) Longitude
9) E or W
10) Mode
M = manual
A = automatic
11) Fix type
0 = no fix
1 = 2D fix
2 = 3D fix
12) Speed over ground, 0 to 999 kilometers/hour
13) Course over ground, 0 to 359 degrees, true
14) Position dilution of precision, 0 to 9 (rounded to nearest integer value)
15) Time dilution of precision, 0 to 9 (rounded to nearest integer value)
16) Checksum
$PGRMI Sensor Initialisation Information
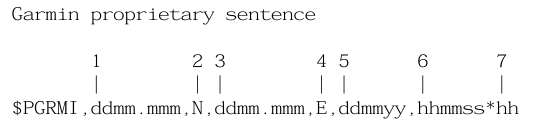
1) Latitude
2) N or S
3) Longitude
4) E or W
5) Current UTC date
6) Current UTC time
7) Checksum
$PGRMM Map Datum
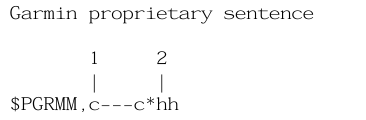
1) Currently active horizontal datum (WGS-84, NAD27 Canada, ED50, a.s.o)
2) Checksum
$PGRMO Output Sentence Enable/Disable
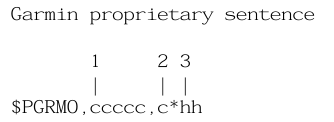
1) Target sentence description (e.g., PGRMT, GPGSV, etc.)
2) Target sentence mode
0 = disable specified sentence
1 = enable specified sentence
2 = disable all
3 = enable all output sentences (except GPALM)
3) Checksum
$PGRMT Sensor Status Information
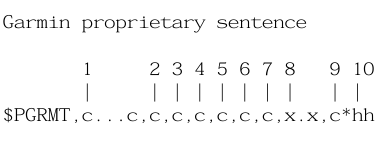
1) Product, model and software version
e.g. "GPS25VEE] 1.10"
2) Rom checksum test
P = pass
F = fail
3) Receiver failure discrete
P = pass
F = fail
4) Stored data lost
R = retained
L = lost
5) Real time clock lost
R = retained
L = lost
6) 0scillator drift discrete
P = pass
F = excessive drift detected
7) Data collection discrete
C = collecting null if not collecting
8) Board temperature in degrees C
9) Board configuration data
R = retained
L = lost
10) Checksum
$PGRMV 3D Velocity
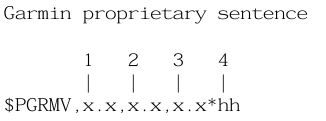
1) True east velocity, -999.9 to 9999.9 meters/second
2) True north velocity, -999.9 to 9999.9 meters/second
3) Up velocity, -999.9 to 9999.9 meters/second
4) Checksum
$PGRMZ Altitude Information
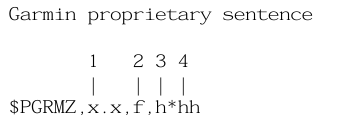
1) Altitude
2) Unit, feets
3) Position fix dimensions
2 user altitude
3 GPS altitude
4) Checksum
$PSLIB Differental GPS Beacon Receiver Control

1) Frequency
2) Bit rate
3) Request type
J = status request
K = configuration request
blank = tuning message
4) Checksum